PAAG – Perfekte Allround-Getriebe 1.41b ATS


PAAG – Perfekte Allround-Getriebe 1.41b ATS
3 Boxen, die mit 45 / 55 / 65 mph bei optimaler niedriger Drehzahl fahren sollen.
Optimiert für Motoren mit maximalem Drehmoment bei 900/1000/1200 U/min.
Für Vanilla Trucks, Kenworth W990 von Harven, Freightliner FLB von Harven, Mack R
Ich mag es nicht, ständig Getriebe zu wechseln. Also habe ich diese Universalgetriebe mit Fantasieübersetzungen gebastelt.
PAAG 16-2/4: Vorwärts 16+2 Gänge, 4 Rückwärts, 3 Stufen Retarder
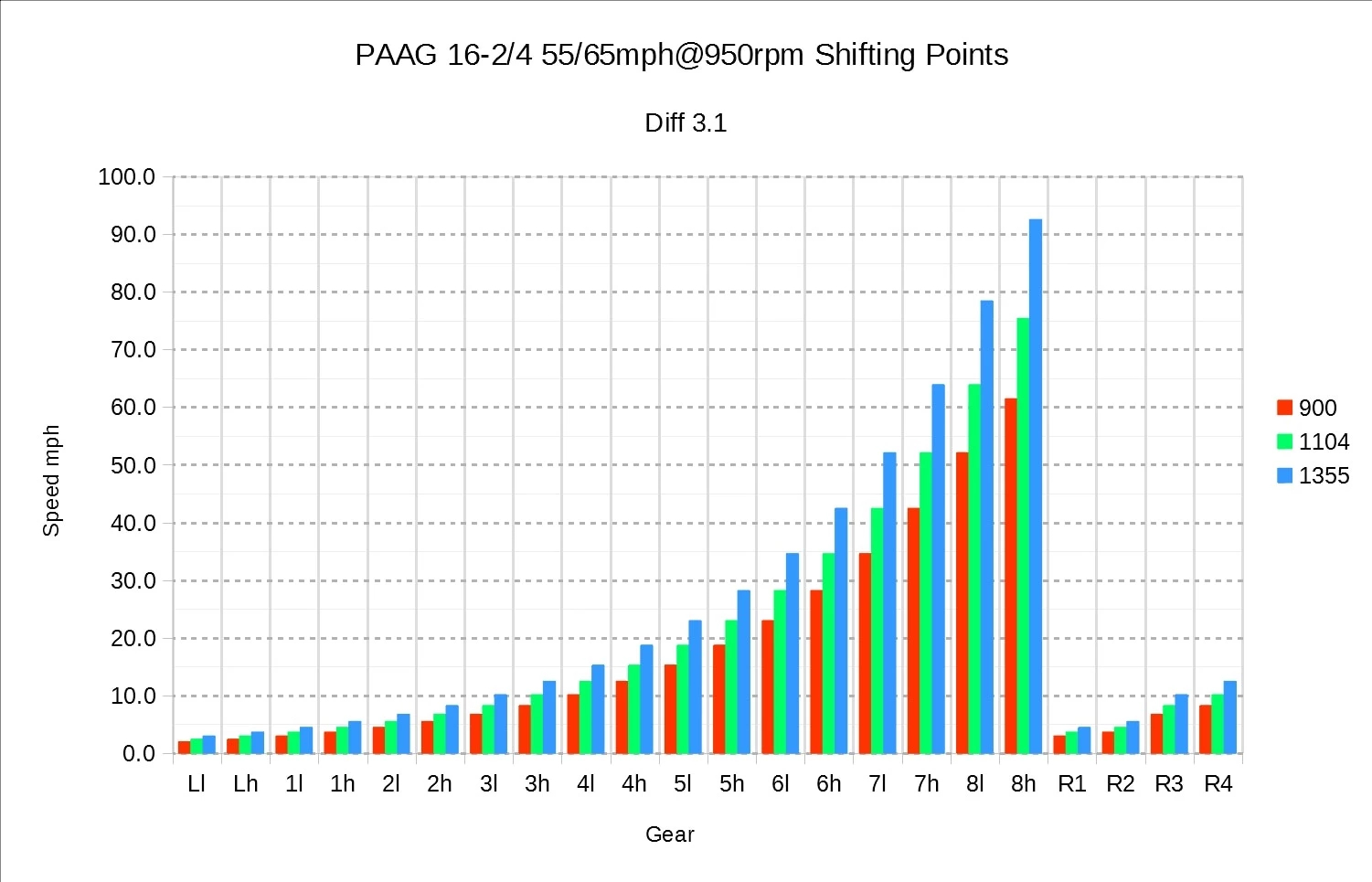
Diff 3.1: Für Motoren mit maximalem Drehmoment bei 900 U/min
Diff 3.34: Für Motoren mit maximalem Drehmoment bei 1000 U/min
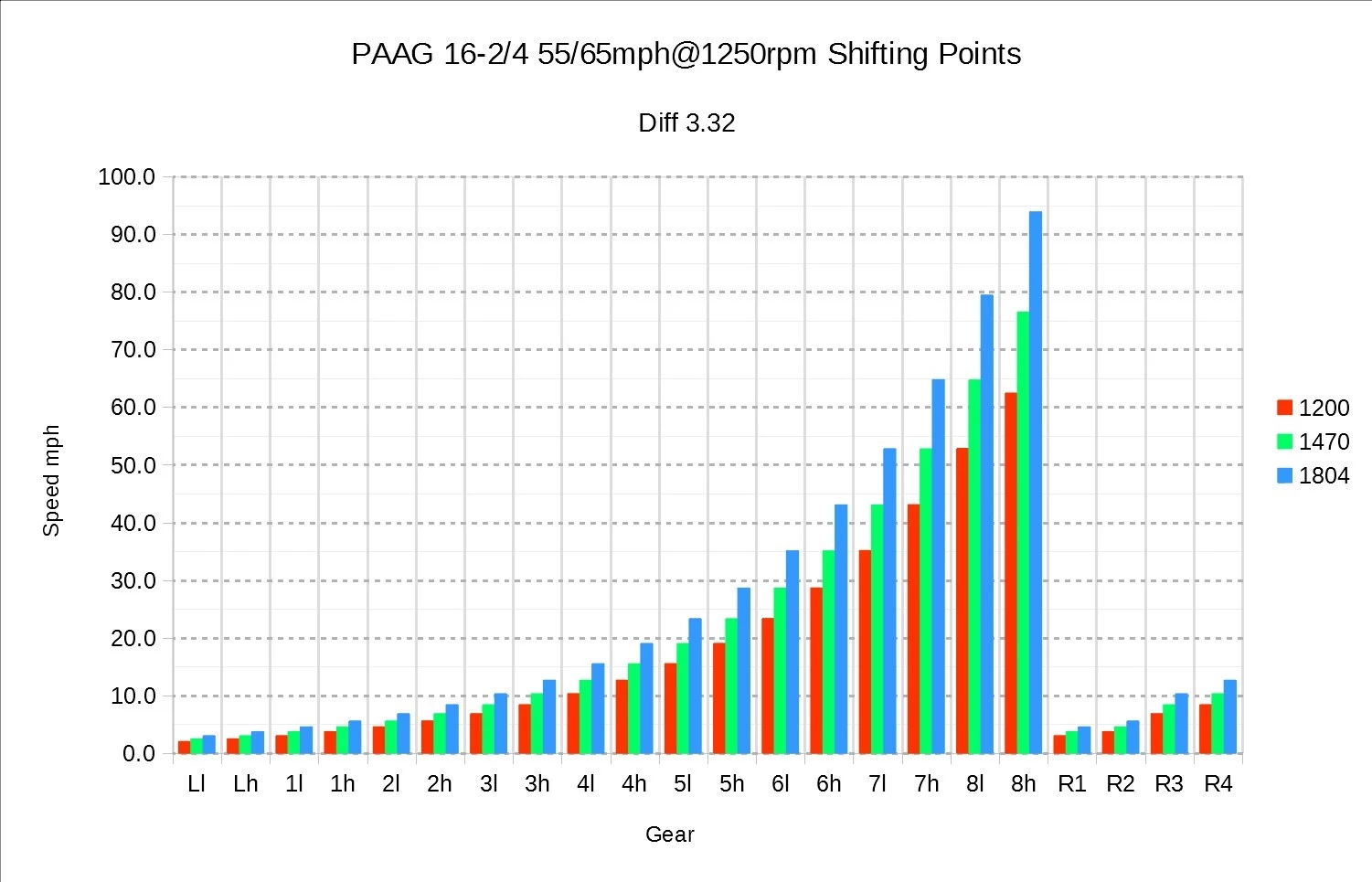
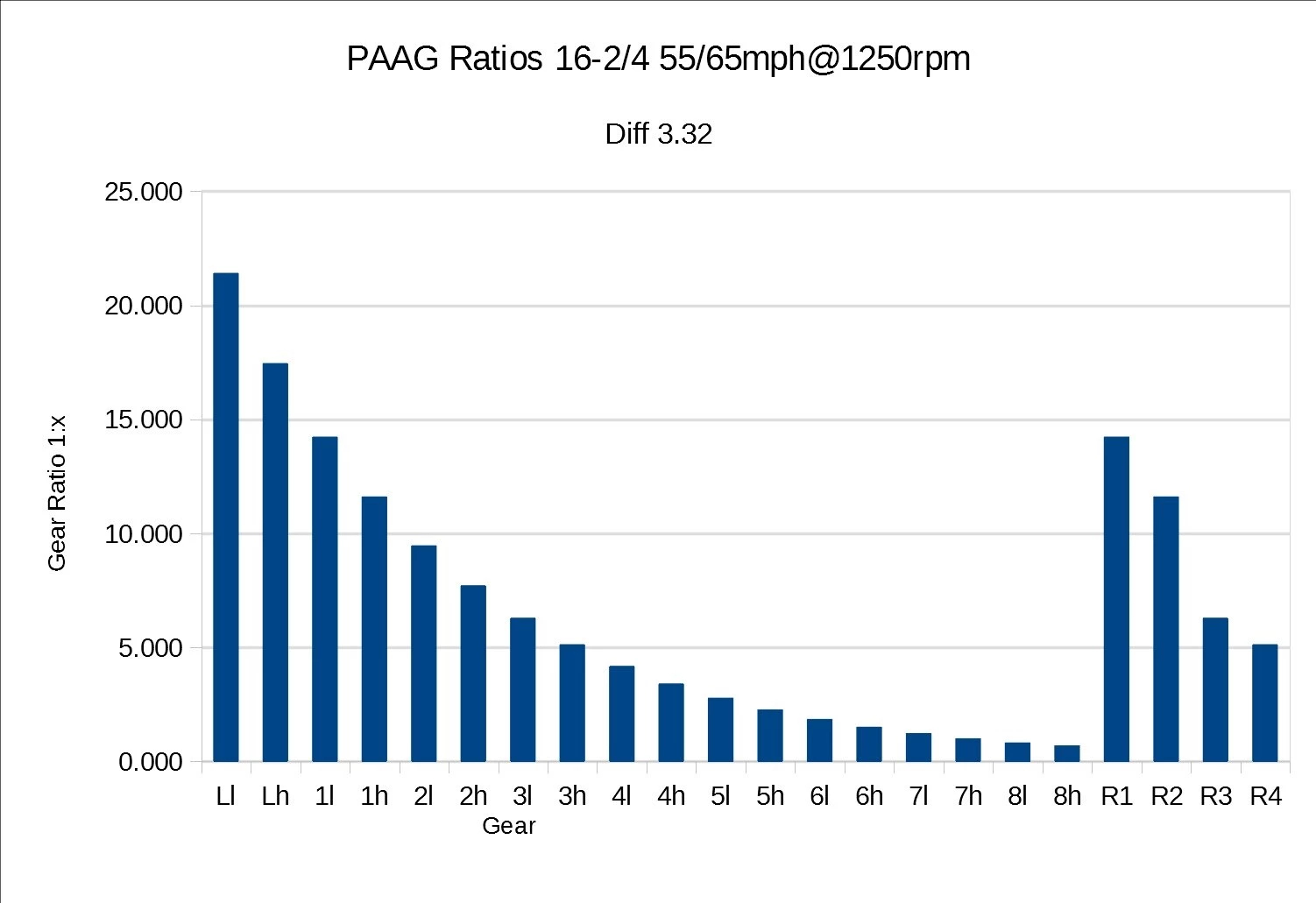
Diff 3.32: Für Motoren mit maximalem Drehmoment bei 1200 U/min
Sie sollen mit schweren Lasten bergauf mit niedrigen Gängen starten und bei optimaler niedriger Drehzahl mit 45/55/65 mph fahren.
Alle Boxen
kriecht: 2
Schaltzeit: 0,85
Retarder: 3
Hilfsbremsen[]: (0.4, 0, 0) #50%
Hilfsbremsen[]: (1, 0, 0) #100%
Hilfsbremsen[]: (1, 1, 1) #100% + Motorbremse + Herunterschalten
# Achsübersetzung
@ 1250 U/min
differentielles_verhältnis: 3.320
# Umkehren
ratios_reverse[0]: -14.228
ratios_reverse[1]: -11.599
ratios_reverse[2]: -6,285
ratios_reverse[3]: -5.124
# Crawler-Verhältnisse
ratios_forward[0]: 21.406
ratios_forward[1]: 17.452
# Forward-Verhältnisse
ratios_forward[2]: 14.228
ratios_forward[3]: 11.599
ratios_forward[4]: 9.457
ratios_forward[5]: 7.710
ratios_forward[6]: 6.285
ratios_forward[7]: 5.124
ratios_forward[8]: 4.178
ratios_forward[9]: 3,406
ratios_forward[10]: 2.777
ratios_forward[11]: 2.264
ratios_forward[12]: 1,845
ratios_forward[13]: 1,505
ratios_forward[14]: 1,227
ratios_forward[15]: 1.000
ratios_forward[16]: 0,815
ratios_forward[17]: 0,690
=
# Achsübersetzung
@1050 U/min
differentielles_verhältnis: 3.34
# Umkehren
ratios_reverse[0]: -10.047
ratios_reverse[1]: -8.290
ratios_reverse[2]: -4,656
ratios_reverse[3]: -3.842
# Crawler-Verhältnisse
ratios_forward[0]: 14.758
ratios_forward[1]: 12.177
# Forward-Verhältnisse
ratios_forward[2]: 10.047
ratios_forward[3]: 8.290
ratios_forward[4]: 6.840
ratios_forward[5]: 5,643
ratios_forward[6]: 4.656
ratios_forward[7]: 3.842
ratios_forward[8]: 3,170
ratios_forward[9]: 2.615
ratios_forward[10]: 2.158
ratios_forward[11]: 1.780
ratios_forward[12]: 1,469
ratios_forward[13]: 1,212
ratios_forward[14]: 1.000
ratios_forward[15]: 0,825
ratios_forward[16]: 0,681
ratios_forward[17]: 0.576
# Achsübersetzung
@950 U/min
differentielles_verhältnis: 3.100
# Umkehren
ratios_reverse[0]: -11.645
ratios_reverse[1]: -9.491
ratios_reverse[2]: -5,138
ratios_reverse[3]: -4,187
# Crawler-Verhältnisse
ratios_forward[0]: 17.532
ratios_forward[1]: 14.288
# Forward-Verhältnisse
ratios_forward[2]: 11,645
ratios_forward[3]: 9.491
ratios_forward[4]: 7.735
ratios_forward[5]: 6.304
ratios_forward[6]: 5,138
ratios_forward[7]: 4,187
ratios_forward[8]: 3.412
ratios_forward[9]: 2.781
ratios_forward[10]: 2,267
ratios_forward[11]: 1,847
ratios_forward[12]: 1.506
ratios_forward[13]: 1,227
ratios_forward[14]: 1.000
ratios_forward[15]: 0,815
ratios_forward[16]: 0,664
ratios_forward[17]: 0.562
Kimo